Self-Stabilizing Gimbal for Videos in Rocking Boats
Introduction
When I lived in Rauma some years ago, I enjoyed sailing with my small boat in the archipelago and made
several long trips which I documented on video
(1,
2)
Therefore I experimented with installing a camera on my boat, but I found it very unsatisfying that
on the resulting video
the boat stands still while the horizon is moving and rocking. The viewer gets seasick because he sees
exactly the opposite of the reality.
On Youtube there are tons of those videos from cameras which are only held in the hand
(3,
4,
5)
or simply mounted in boats
(6,
7,
8), but this was no reason for me
to accept the results. But how can a camera get stabilized?
The well-known Steadicam system was the wrong way, I thought of something which aligns itself quite alone
for an unlimited time. After several failures
I found the solution.
Technology
I found that the same problems are also connected to quadrocopters where lately a strong development has taken place.
Quadrocopters can not be controlled purely manually, they need a sophisticated control system with electronic position
and movement sensors – and the same components are also used to stabilize cameras which are carried by quadrocopters.
The main components are:
- control boards with IMUs (inertial measurement units = sensors for velocity, gravity, orientation)
(1,
2)
- brushless motors (3)
- power supply
This technology is also already used in purchasable hand-held gimbals
(3,
4,
5)
which are going to replace the merely mechanical
Glidecam and
Steadicam systems.
Why I developed my own gimbal
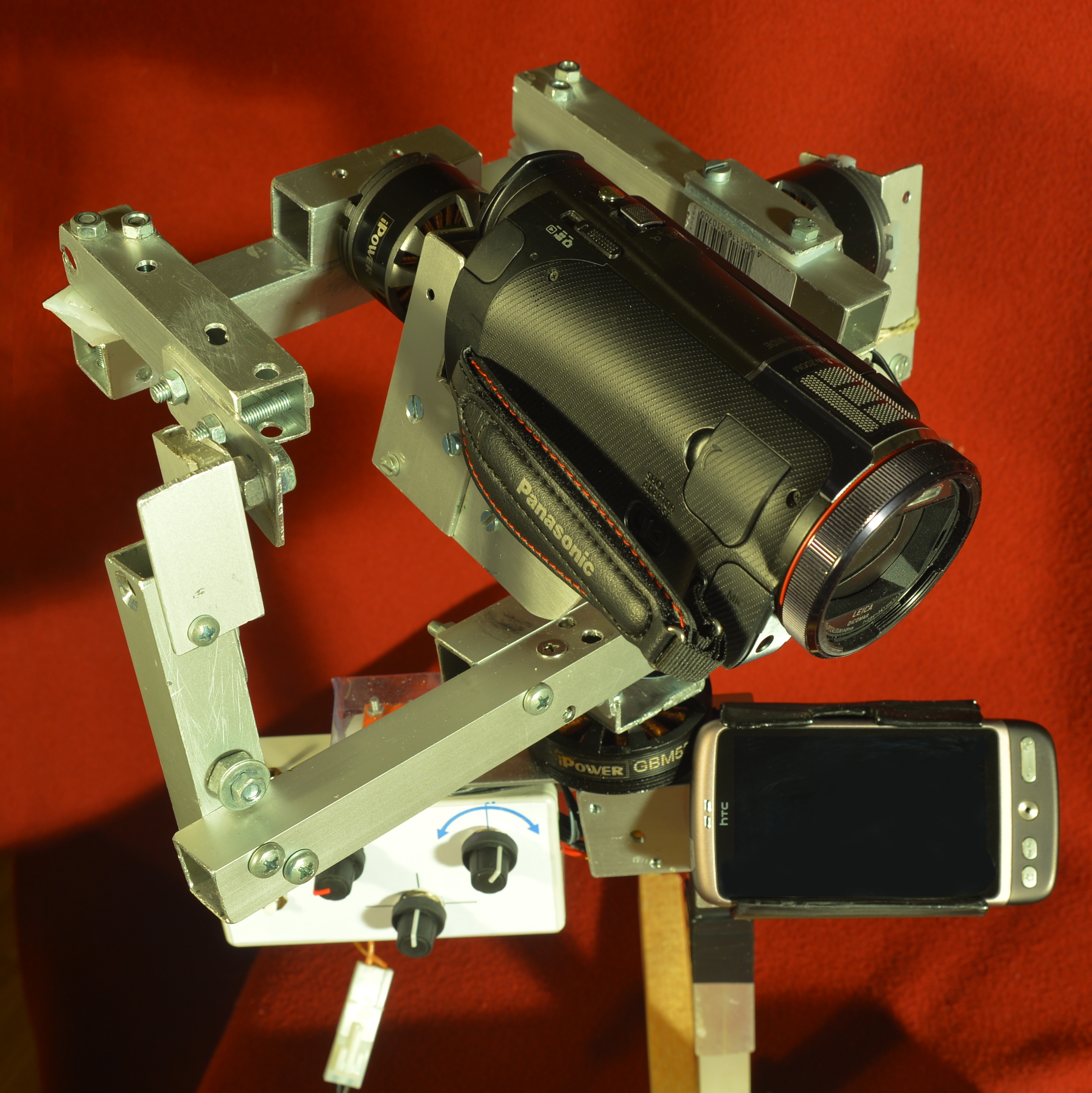
 | |
| My gimbal | |
 | |
| My remote control | |
Those purchasable hand-held gimbals are very expensive. For proper working, the center of gravity of the camera
and all parts has to be located at the intersection of all motor axes. Therefore, purchasable gimbals have
variable elements which can be adjusted to the camera, but this feature increases the price of those gimbals.
And then, I want to use the gimbal in my sailing boat. Usually I need both hands for sailing, only in easy situations I can
use one hand to hold a camera. And last not least: if I have a hand-held gimbal in my hands, I can not take pictures of myself.
My device is tailor-made for my camera. I ordered three brushless motors and a control board from quadrocopter web shops and
built a cheap gimbal out of simple aluminum profiles. It has no hand-held grips, but can easily plugged onto another aluminum
profile which might be fixed somewhere to a boat. In order to reduce weight, a power supply with some accumulators is placed
in an additional box which can be carried on a shoulder strap.
The gimbal has two IMUs (inertial measurement units = sensors for velocity, gravity, orientation) which are connected
to the central control board. One of them is placed under the camera, the other one is placed on the bottom frame.
Three controls can give extra adjustments to the camera in all three axes. So I can pre-set the direction of the camera
which is then maintained the gimbal.
Very important is my remote control which can be connected to my gimbal with a 5 m long cable and then automatically
replaces the three controls. The power supply can also be connected to the remote control box. So I can place the gimbal
in the bow of my boat and control the direction of the camera from the stern.
I am using a Panasonic camera which is able to set up a Wi-Fi network and establish a connection with a mobile phone.
The Panasonic
"Image App" turns the mobile phone into a remote control for the camera. The viewfinder image is shown
on the screen, and zoom and other functions can be controlled. Therefore, I equipped my gimbal with a mobile phone holder.
Also the remote control box has a mobile phone holder.
Follow Mode
| |  |  |
| Normal Mode | Follow Mode |
The control board can store up to five sets of settings which can be selected by pressing a button on the control box
rsp. on the remote control box. The settings can for example differ how fast the gimbal shall respond to movements.
I can also switch from Normale Mode to Follow Mode. In Normal Mode, all movements of the boat are compensated by
the gimbal. In Follow Mode, only fast and short movements are compensated, but the gimbal follows slow and long
movements – that means it follows the general direction of the boat.
Obviously, sailors and quadrocopter builders live on different planets. Sailors don't know that there is a technology
which could improve their videos dramatically, and qadrocopter builders don't imagine that their technology could
be useful also for other people. This project wants to open their minds for eachother and connect both worlds.
Sailors get acquainted with a yet little known method how to make much better and more realistic videos than before.
This will lead to an increased demand and sales of special parts (controllers, motors, etc.) and hence to lower
prices, which will be a benefit also for quadrocopter builders.
More files
Paul Lenz – Goethestr. 71 – D-63067 Offenbach – paul@lenz-online.de –
www.lenz-online.de